So I decided I needed a new project for the summer and it led me to what initially thought was some harmless daydreaming about building an R2-D2. Well, the thought got stuck in my head long enough that I ended up deciding to investigate it further. It turns out that there is already a community of people dedicated to exactly this endeavor. Seeing how big Star Wars fandom is in the world I really should have guessed that this was a thing already, but I guess I was unprepared for the vast amount of detail available. They have blueprints, part breakdowns, very precise measurements and more. Below is an image of one of the user’s complete R2’s as an example of how high quality they can get.
Upon investigating, I saw that there were three primary materials used for construction. The one pictured above is made of the most desirable and difficult to work with – aluminum. Droids made of aluminum will frequently cost in excess of $3000 in aluminum alone. The additional electronics, motors, screws, bolts and tools can increase that further. This in addition to the fact that you need good tools to properly work with aluminum and that mistakes are essentially irreparable meant that I quickly ruled this out for myself.
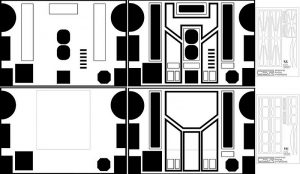
The other two options were wood and polystyrene plastic. Honestly, both of these options would probably work for myself. The plastic and wood are similar in cost, with the wood likely being a bit cheaper and both are easy to work with, requiring only normal tools such as saws, dremels, routers, etc. to properly build with. In the end I opted for the Polystyrene plastic because a user had recently created a newly updated set of schematics with an R7/R8 skin that I thought looked especially cool.
The skins pictured above immediately struck me as Boba/Jango-Fett esque and I fell in love with them. As soon as I saw it I decided that I had to make one in a Boba Fett paint scheme. The current plan is to have it ready for Pax East which is in April of 2017. Based on what I understand is a normal build time of 8-12 months I’ll have to make sure to put in plenty of effort for that to happen, haha!
Previously I’ve shown attaching the legs to the body, but I haven’t done much with the feet – that’s because it felt fairly shallow to show the motors getting attached without showing it actually driving. To get it to the point of driving, however, took a lot of tweaking and electrical work. However, it has finally all come together, and K4 took his first steps! The shortened version of it is: this was a pain, many parts took a lot of tweaking and work to stabilize properly, but here are his first real steps:
This was a long time in the making, however, so this will be a fairly long post describing what it took. For reference, here are the scooter motor feet after the last update:
So, what needed to happen, was holes had to be drilled at the top for the ankle to mount to the foot, three holes had to be drilled in each side for the motor mounting screws, and then a much larger hole between those for the motor sprocket to fit into (a sprocket is a gear, but instead of touching a gear, it touches a chain), and then finally holes had to be drilled for the wheel axle to fit into. Let me summarize something like 40 hours of work by simply saying that getting all of those into alignment was difficult. Very difficult. Since I had to drill all the holes by hand, and the feet are such odd shapes, I ended up having to use a lot of washers and various spacer rings cut from scrap plastic to get things together. However, with a lot of help from my dad holding, cutting, and generally pointing out where I was making mistakes I did finally get it all in place.
What you can’t see here easily is that the chain is actually much too long for the feet. I had to special order master links for the chain and then use a dremel grinder to split it, and remove 3-4 links. I don’t know the exact number because I actually had to go through the process of removing links twice, because out of an abundance of caution the first time I shortened the chain, I didn’t shorten it enough. It was an extra pain in the ass, but at the end of the day I was able to get a pretty solid connection between the sprockets so even though it was time consuming, I can’t complain too much about it. One distinct issue that I will have to be conscious of going forward is that due to how sensitive the alignment of these parts are, I am hesitant to build the foot normally. I would rather have magnets, velcro, or perhaps some sort of latching system in place that would grant me quick access to the motor screws and the axle to ensure that if it comes out of alignment, I can quickly shift it back.
This overhead shot of the feet shows where the axle and motor are mounted and gives a bit more indication of how things can get out of alignment. It’s hard to tell because of where the motor power cable is in the above image, but I actually believe that the bottom foot has its wheel out of alignment. What I actually had to do to compensate for this was drill a slot for the axle to sit in, and then move it. I tried using lock washers and regular washers to hold it in place, but every time I powered the motor I found it slipping back into its old position. To resolve the issue I actually took some scrap plastic and back-filled the slot to prevent the axle from being able to move. So far this solution has worked well enough to be passable, but as mentioned previously I’m worried enough that I’m leaving adding the sides to the feet until just about the very last steps, lest anything else I do cause them to have problems that I need to correct.
I will save the electronics necessary to get K4 moving for its own, separate post, in the interest of trying to keep things organized.
This entry is going to go into detail on how I got K4’s dome to spin. The secret ingriedient here is a Lazy Susan Rockler bearing. This bearing allows you to mount something to one of two concentric rings, which will then spin inside of the other ring. In this way I can attach the bearing to the body of K4 and then have bolts stick up which will attach to the dome and allow it to spin. Here is a picture of the bearing:
This isn’t my bearing – I forgot to take a picture of it before I mounted mine.
In order to make the ring work, what you actually have to do is drill out the holes on the inner ring. Normally those holes are just for some rubber feet which are used to hold up whatever platter you’d put on it. In our case, since we need to put bolts all the way through them. This is a pretty simple task, though – the ring is made of aluminum and is mostly drilled already. Then it’s simply a matter of placing the bearing on top of the body, marking the holes and drilling them out, and finally putting the bolts through the holes. Below is the bearing attached to the body, with some small pieces of wooden being used temporarily as spacers.
With these bolts sticking up out of the bearing you can see how the ring the dome will be attached. In order to make sure I got the bolts lined up with the holes I would then drill out of the dome, I applied a little bit of nail polish to the bolts and then placed the dome on top of it. The pieces that attach to the dome are actually two parts: a sort of a skirt piece, which comes down and hides the rockler bearing, and then the dome itself. In this next picture you can see the skirt piece placed atop it. When I got the skirt it was one solid circle of plastic which needed to be cut out – which was significantly more of a pain than you might think, seeing as I can’t get it under a band saw or anything like that, I was forced to use the dremel.
The final step to get the dome on was to cut a circle out of plastic which the dome would be glued to. Since the dome I bought didn’t have any pieces inside of it to give it rigidity or to allow mounting, it was necessary for me to cut one. To do this I cut a circle slightly larger than the inside diameter of the dome and then used the dremel to slowly bring it down to the right size. This was simple, but extremely slow and tedious process. There are many different shapes people use for the dome cutout, but in my case I opted for the simplest in a simply bar across – but frequently people make a peace sign shape or even a three pronged sort of fork shape instead.
So, having gotten much of the body painted a big next step is getting the lights in place!
I ordered a pre-soldered light kit with a small circuit board with some code to set the LEDs to blink and change color at seemingly random intervals. What this allows me to do is worry simply about mounting the lights rasther than needing to buy a circuit board, program it to light LEDs, and solder each LED individually onto the board. These tasks are all trivial, but fairly time consuming. As such, I didn’t see it as necessary to do myself – especially since as an amateur at soldering I felt like somewhere in the 200 or so lights I’d inevitably make a very frustrating mistake. In the below pictures you can see the holes where LEDs/detail would go and how I had to dremel/sand it down to get the edges flush, as well as a picture of the assembled lights.
Mounting the lights was a relatively simple process, all I had to do was wire them all together to the main circuit board by daisy chaining them, cut the appropriate slots into the dome, and glue them in place. Additionally, each set of lights comes with a small filter, for lack of a better word, that makes it look like a light panel, as opposed to a bunch of individual LEDs. The effect is actually pretty impressive – the video below illustrates the effect.
This post is a quick update to show progress on K4 as we go into X-Mas. The dome is on, half painted and spinning (but unpowered – I still need to get the motor in order to spin it via RC) along with the legs having been painted as well as most of the leg detail.
Note the imperial badge in the bottom left – it took a fair bit of work to make, but damn does it look nice
Painting, at long last. And a long post to celebrate it, haha.
This particular process will be ongoing for quite some time and probably encompass multiple posts as different parts need to be painted at different points in the build. I’m trying to paint things as they get put on so that they spend less time wandering about where they could get dirty/scratched while also not painting over places that will need to have additional parts attached. I made the mistake in a couple of places of painting spots that shouldn’t be, and then having to use a scraper to remove the paint in order to glue over it. For the most part, though, it was just a lot of painters tape.
In order to get the most out of the early fall weather while it was still warm enough to paint outdoors I tried to get as many parts done as soon as possible for it. This consisted of the body, legs, horseshoes (decorations for the top of the leg), body trim, and various detail pieces.
Before I did this though the first thing I did was pick my color scheme and then test the paints.
Black, silver, and orange test piece
The above shows my first test on the black, orange, and silver paints. This is the first time I’m mentioning it here, but pretty much since the get-go I’ve debated whether to build a true R2-D2 or to do something more custom for myself. Well, the painting is what finalized it in my mind and I decided to go custom!
Technically rather than an R2 astromech droid from star wars, what I’m building is an R7 astromech. In the Star Wars universe there is a whole series of R unit droids, just like there are multiple iPhones. However, according to the in-universe lore pretty much everything after R2 is quite bad, which is how they explain later R units existing, but Luke keeps R2 anyway. The R7 is the first one after the R2 to actually be a useful droid although I chose it mainly because it looks badass. I found some fan art online of a black and green R7 unit and decided that I loved the scheme – except it should be orange, and not green. This is the same color scheme that Poe Dameron the amazing rebel pilot from the newest star wars trilogy has his X-Wing fighter painted and I love the look of it.
Green R7, whose paint scheme I am going to be similar to
A model of Poe Dameron’s X-Wing
So with this new layout and color scheme in mind I’ll need three paints: black, silver, and orange. The black and orange were pretty simple to find. I went for a matte color because you can use wax rub and buff afterwards to give a really nice metallic effect to the plastic as I’ve seen other R2 builders do. The silver, however, was much harder. First of all, the paint I tried was much more silver than it was metallic – it just didn’t have the correct sheen to be mistaken for metal at all. I tried a second silver paint, which wasn’t great, but lacking options and wanting to get as much done as possible I settled for. This is the silver you’ll see in the following images of the parts laid out.
At this point, since I had decided to build an R7 I cut out the correct shape for the skin and glued it over a second layer of the skin I put on the body. The second layer of skin had no detail on it, it was simply to cover blemishes in the first caused by the glue melting through it. The 3rd layer seen here taped on is the outline and detail that creates the texture of the R7 body.
Detail skin taped while weld on dries
Once that was dry I taped off the parts of R2 that shouldn’t be black. This process takes substantially longer than you would think, especially for the R7 style of look because it has much more color variation on the front and back than the standard R2 does. I then brought the body and other pieces outside and set them up.
Front of R7 taped off and ready for painting
One thing that was a pain for this part of the process is that I had to ensure that the surface was completely clean, but leaving the parts outdoors meant there was always some threat of some dirt/dust getting blown onto them by the wind. Inevitably this happened in a few spots and I had to touch it up, but mostly I was able to simply spray a couple of layers of paint to cover blemishes.
I also painted some of the silver detail parts that would need to go onto the legs in the not-distant future, since I was trying to get as much painting done at once as possible.
However, upon closer inspection these parts did not come out well at all. You see, these detail pieces are all painted resin and not the same polystyrene as I’ve been using for the rest of R2. For some reason the paint did not stick well to resin at all, and in many places left a lumpy/bumpy texture to it.
I would be tempted to say that this was something wrong with the resin casting itself, but the piece directly next to it was made from the same mold from the same seller and dried in the same conditions. I wasn’t going to keep this paint job anyway, but as I moved the pieces about I also found out that the paint was rubbing off of the parts. And I do mean rubbing – it didn’t take much at all to remove the paint from them. As a result I decided I’d have to soak the parts in paint thinner and scrub this silver off of them and try again with a new formula.
It turns out, though, finding out what paint WILL work on resin plastic isn’t as easy as a google search. There’s a special mix of Krylon called Krylon Fusion that will, but it comes in a very limited set of colors and none of them are chrome. I actually called a couple of paint stores to no avail, until someone offered to reach out to their supplier at Krylon and get back to me. When they did get back to me the Krylon rep said I should use an automotive primer – CP199 – on the parts and then once that was on I could use pretty much any paint on top of it. Since I was in the automotive store anyway, I went ahead and got an automotive chrome which was a much more realistic metal compared to the “metallic” silvers I’d gotten prior.
First silver paint, which I’d started to clean off – and despite it coming right off there are lots of corners that were very hard to reach
The bottom of the previous piece – this is primed and coated with the new silver – the lite scratched are from going at it with a finger nail to ensure it would stick
After testing the new paint and seeing it come out a much nicer chrome color as well as sticking better, I decided I could use it for all of the detailed parts that required silver over again.
This is all of the extra pieces laid out for me to paint them on a tarp. The horeshoes are in the second picture hanging up to allow me to get at them from all sides.
Parts laid out, you can see the red CP199 can in the top right
Horseshoes drying while my golden retriever wonders why he wasn’t invited
This second round of painting occurred some time after the first, since I had to research the new paint to use for the silver and do some touch up on detail pieces to ensure they were ready for painting. As such, I had time to assemble R2 with just the black body, before the orange stripes were added. It makes for a good before and after picture (which I’ll put at the end), but for chronology’s sake here is just the black body with the legs.
The dome looks more complete here than in the previous pictures, but no extra work was done. This is simply only the outer “detail” piece of dome, rather than both the outer and the inner at once.
You can see that all black would be nigh on impossible to do on an R2 and still have it come out looking good. It just loses all its detail since you can’t see the shadows which give it depth and make it pop. I’m glad I had already decided on the orange at this point – if I had gotten here and gone for an all black droid in the style of the Empire I’d have been very disappointed in invisible all the detail is.
Here is the same angle with the painters tape removed.
All in all I was pretty happy with the taping, it didn’t seem like much/any paint bled at all, and where it did it would be pretty easy to touch up.
The next part of the paint process was to paint on the orange stripes where required, which was much easier said than done. The taping itself took something like two hours to do, and I didn’t do a good enough job at all. I completely underestimated the amount of wind and how far the orange speckles would go. In the end I needed to touch up a not insignificant portion of the black to remove the speckling.
Front with tape
Back with tape
This left me with the outlines in place and so I then needed to glue the black pieces onto the remaining white areas (or in the cases of the long rectangles on the sides, vice versa). The following is the before and after of this process on the front of R2.
Front, after the tape was removed – you can see the bleed of the orange, but this wasn’t an issue as I wanted the stripe thicker than necessary rather than too thin
Front, after attaching the black cutouts
In the second picture where the lighting is better you can see how the bottom of the body has picked up some orange from when I wasn’t careful enough. I touched this up the next day, and in spite of it I was very happy with the way the orange looks. In darker lights the orange takes on an almost crimson hue, which I don’t mind in the least either. All in all, at this point I was very pleased with the progress being made.
One last photo on this post below showing the back missing a panel, this illustrates the difference and gives you an idea of how adding the panels creates some depth in the detail. I feel like the added depth is really important as just doing the flat colors is quite tacky looking.
This will be a short post, but it will also be a VERY sweet one!
I’ve done a post on assembling the legs, the feet, the hubs and the body, which means now we get to stick them all together!
The first step to attaching the legs to the body is taking the hubs and marking out where the slots need to be cut into the skeleton. Now, this was marked on the original plans but over time I fear that the paper has drifted around and let’s face it – the bolt holes I drilled into the hubs are not perfectly lined up. So in order to determine the right locations I borrowed some nail polish and put it on the ends of the bots. I then held the leg up to the body and pressed it together, painting streaks where the slots should approximately be.
Hub and body with nail polish on them
As you can see, the holes are mostly the correct distance from the center, but are not even close to correctly positioned to ensure the leg sits at the correct angle. I think this is a result of the way I drilled the holes from the template – something may have gotten mirrored. Regardless of why, once I knew where to make the holes I was able to drill and dremel them out to ensure the legs would fit.
Here you can see the body of R2 with the legs attached, but not the feet. At this point the feet hadn’t been permanently attached to the legs, and I wanted to test that I could get the legs to approximately the same angle on each side before I added the additional weight of the feet. Because of the weight of the motor and wheels the legs become very awkward to work with once you attach the feet to them. And I still get nervous holding the legs without supporting the feet even though they seem to be fairly robust.
Body with legs attached to test alignment
In the above photo you can see how the hub is almost entirely concealed from view by the leg and the body. You can also see on the far side of R2 that the bolts extend into the body a fair amount, allowing you to put washers and bolts onto them. These bolts will always be accessible so that the legs can be detached in the future for easier transport. He’s definitely not small, so this modularity is extremely welcome – otherwise getting him anywhere would be a major pain.
Once I knew for certain that the legs could be attached successfully, it was time to try and get the feet on. As discussed in the foot building post, a .5″ diameter dowel was used to attach the feet to the ankles on the leg. The solution for the center foot was a little more simple, if not just as much of a hassle. For the center foot, two holes are drilled into the bottom of R2, and through them two wood screws are drilled into the center ankle. The center ankle itself is basically a little nub that sticks out just to get the center foot into the right angle. The below picture is from when the center ankle was permanently attached later in the process and I had begun painting.
Center ankle attached to R2, without center foot
Once this was successfully attached (which wasn’t easy, because the layers of plastic kept splitting while drilling), I was ready to attach the center foot and the legs as previously described culminating in the following picture.
All parts attached, but none permanently
As you can clearly see in this photo the legs are far out of alignment and the dome is simply placed on top of the body – but for the first time it’s actually recognizable as an R2-D2! This was a huge milestone, literally years in the making. With everything put together like this, it’s starting to feel like the home stretch!
This post will be a fairly brief one – mostly it will go over process of attaching the legs to the main body of R2. As a refresher, the inside skeleton, sometimes referred to as the egg carton, frame of the robot has a thin skin wrapped around it. This skin is much, much too thin to support any real weight or force enacted upon it. So much so that later on I will actually use three layers rather than the standard two, just to make myself feel better about the general integrity of the body.
This is that skeleton from the side – you can see the grooves labled for where the bolts from the legs should go into the frame, with a center hole marked for electrical cables that will eventually run down to the motors in the feet:
At this point the body was a storage bin for other misc. bits and pieces, as well as some of the rolled up templates that had yet to be cut out. Once that was all together I wrapped a piece of plastic entirely around the frame, gluing it with the weld on to each of the exposed edges to ensure it properly held it’s shape.
With this layer on, it looks much nicer – now it’s clearly a trash bin!
I had to use plenty of painters tape to tack down the edges and for some time I applied pressure by hand as well. One thing that I noticed and you can see in the bottom of the picture is that the weld on, since it’s not a normal glue, but rather a solvent has left visible marks where it attached to the frame. Basically, the way it works is it dissolves the plastic, evaporates, and then the two pieces of melted plastic fuse together. It’s excellent insofar as it literally welds the plastic together creating extremely strong bonds, but as you can see in this example here, it also causes the plastic to distort if it’s too thin. Eventually to resolve this I will have to put an extra layer over this one to hide the blemishes.
Something important to note, that you’ve probably never realized, is that R2’s legs don’t attach directly to his body. In the above picture you can see the circular cut out where the legs will go, but what actually attaches there is known as a shoulder hub. This hub attaches on one side to R2 and on the other side to the body. I think the point of this piece in the original R2 was to give some place to distribute the forces incurred while driving and turning that was directly into the body/leg, and thus made him a little more durable. To create these hubs, I needed four circles cut out and glued into two circles each two layers thick per hub.
Each of the hubs then had a series of supporting struts glued to it in order to attach the two of them. This is critical to do well because as previously mentioned there will be a LOT of force applied to this piece. This was a VERY time consuming process, as it required my spending a significant amount of time sanding and trimming edges until they were able to glue the two sides together.
However, despite my best efforts, I still found that many of these pieces were either different heights or not level. So when I glued the opposite side on top of this one many of the joints required I shim them with pieces of scrap in order to create a solid contact. So after something like 6 hours of work sanding, trimming, shimming, and gluing I finally got bother of them together adequately and put the bolts in them to ensure everything lined up, which it mostly did, after a little adjusting to the angle of some of the drilled holes with the dremel.
Hubs Assembled
Once those were together it meant I could attach them to the legs:
Legs + attached hubs
This ended up being a SIGNIFICANTLY more difficult task than it should have been. On the other side of the legs we have ribbing just like what was used to attach the two sides of the hubs together, and it turns out due to poor cutting on my part, and even worse drilling the bolts came out too close to the ribs in order to put the bolt on them and therefore I had to spend a lot of time at awkward angles sanding and dremeling and doing whatever I could to get them on. I don’t have a picture of them directly interfering but the below image makes it pretty clear how it could happen. The below picture also shows the strip of skin wrapped around the outside edge of the hubs, this was also a bit of a pain as I had to do a good job sanding the circles to make sure that they were, in fact, circles.
So it’s been a long time since my last post, but it’s because so much has been accomplished! This time I’m going to have some very rewarding pictures that go up, but to make it all more digestable and navigable I’m going to split it up into a few separate posts.
In this post I’m going to cover the building of the actual feet from the parts I went over cutting out previously as well as attaching them to the legs.
The actual assembly of the feet wasn’t particularly difficult, as at this point I have spent many hours gluing and bracing and reinforcing using the Weldon #3 that cements the polystyrene plastic together. Instead, the problem was mounting the motors.
Skeleton of the two ankles
As you can see in the picture the slopes pieces have a gap underneath them where the motor, sprocket, and wheel all will mount. Getting them into this tight space and aligned was far from easy. It took a lot of expanding the initially drilled holes with the dremel to give the motor enough wiggle to sit in the correct spot, as seen below.
Foot showing motor mounts
This picture is from much later in the process once everything was set up correctly, and as you can see I needed several washers and a lot of wiggle room in the motor mounting to line it all up. The chain itself was a problem too – it turns out that the ones I got didn’t come with a master link attachment, as it is a standard replacement part for an electric Razer scooter. This meant I had to buy a pair of separate master link items off of amazon, wait for them to ship, and then get help from my dad to break the chain and then close it again to the correct length. As luck would have it I got the length on one off by a link at one point and had to re-do the process, later once I started to test the motors.
Picture of feet from above, unaligned
Once I had the motors in the feet, though, I couldn’t help but want to get them attached to the legs. One step closer to getting him standing, and even walking! To do that, after some consideration and advice from my dad, I decided to use wooden dowels. We went to the hardware store and got some .5″ thick ones, thinking that we would need something beefy to ensure the stress put on it while turning didn’t snap it. I’m still a little nervous about this choice, but worse case scenario if it does break, I should be able to force it out and replace it with a sturdier piece of metal. In order to hold the dowel in place and not slide around I drilled a hole into the very end of the dowel rod, inserted a split pin, and then used pliers to bend the end.
At this point, with the drive feet attached to the legs, I needed to get to work on the center foot. The center foot, however, was much, much, easier to get together (at least at first). This consisted of simply assembling the frame and then using a tap to tap a drilled hole in it that I would screw a caster wheel, i.e. the wheel on a grocery cart, into. Spoiler alert: when I put weight on the caster wheel it actually bent and warped the plastic it was screwed into, completely ruining the threading in the plastic and making the wheel lopsided. In order to fix this I went out and bought strips of aluminum, drilled and tapped them, and glued them onto the plastic aligned with the previously drilled hole for the caster. The hope being that by distributing the forces further out along the foot I prevent this issue from recurring. Again, I am concerned about the wear + tear and the forces that will be put on these joins once I start driving, but until I know the points of failure it’s hard to prepare properly. Especially since it’s so laborious to get the bare minimum done, haha.
Foot, prior to metal strips being added
Foot with metal plates visible
There was also one last issue with the center foot to be sorted out – it turned out some of the pieces didn’t line up correctly. Likely due to a combination of factors such as imprecise cutting on the band saw, prints that didn’t come out 100% to scale, and poor measuring skills. I just want to say, for the record, that this would have been a lot easier with a professional workshop, rather than whatever tools my dad has around from building our house 20 years ago. That said, here’s the damage:
Gap cut into foot on right side, due to being too small
I had to cut the once solid piece into two halves, and then use the side pieces to hold them together. Without this there simply was no way to get the sides to properly align on the outside of the foot. To be honest, I’m just glad the fix for this was relatively simple because when I very first noticed I nearly had a panic attack as I was running out of time to get R2 standing before I had to leave and wouldn’t have access to my dad’s tools anymore.
I was able to finish the two feet up to the point that the scooter motors and wheels are ready to be attached, however it took a few weeks longer than I would have liked. I was using a portable band saw to cut the pieces for the feet when the capacitor in it blew out:
Sadly the magic smoke escaped from it through the pictured crack thus ending my cutting for the day. I had most of the pieces of the first foot as shown in my previous post, but I had to wait to get a new one shipped to replace the capacitor before I could cut the pieces for the second. Well, I didn’t HAVE to wait, but cutting the 3mm thick plastic with a box cutter isn’t very easy or fun, haha.
Once I did get the replacement capacitor and the prints for the second foot a week or two later I finished up the cuts and assembled the second foot. Below you can see a stack of the cut parts for the second foot.
I also just about finished the shoulder hubs. In the below photo taken from directly above you can see that the circles weren’t perfect so I had to use a dremel to grind it down until they were the same size. You can see the top hub has already been done in this picture and the lower hub was about to be done. I was surprised just how far off some of my cuts were, but at the same time I’m really free handing a lot of these with only the paper template or sometimes a pencil outline to go by.
Below are the two feet ready to have the scooter motors and wheels added. At this point I have the hubs, horseshoes, legs, and feet all just about ready for attachment to the main body. I’ll need to take some time to make sure I understand how everything assembles, but so far it’s looking like with some effort it may be driving by the end of the summer!
This post will be a quick update, just to give a run down on some of the progress that has been made:
I purchased the Electric razor scooter motors, gears, wheels and chains for R2 to be able to drive.
I’ve cut and begun assembly of one of the drive feet – I will have to get the plans for the 2nd foot printed out and begin work on fabricating the parts shortly, but I’m going to attempt to finish one foot first. This hopefully means I won’t make as many mistakes on the second one. That said I’m not holding out hope for it to be painless, haha.
This photo shows the larger pieces laid out as I was organizing them for assembly. At the bottom of the photo you can see two long rectangular pieces – unfortunately the third piece of similar width + length didn’t get cut out as I had forgotten it with other parts. This meant I could only start the very beginning of the foot as shown next.
It’s quite difficult to make out in this photo, but I’ve actually glued three of the pieces (the trapezoidal ones from above) together to form the main block of the food and used the two triangular ones to create the support. Most of the effort at this point is going over the edges with my dremel to sand them down so that they’re even and match the other pieces they’re glued to. Due to the imprecise nature of my cuts this portion is frequently quite lengthy.
In addition I finally got around to completing the skirt section of R2, which while it will definitely need some polish, felt good. Throwing that packet of instructions into the garbage was very satisfying. In this photo you can see that I’m using painters tape to hole the curved skirt pieces in place while the solvent dries. Once that was done I then took the detail pieces seen in the middle and placed them on the outside. There were no specific directions for how far apart to place them so I used some photos for reference and just winged it. I did measure the total length of the curve and make sure that the gaps were symmetrical, though.